Embedded Linux
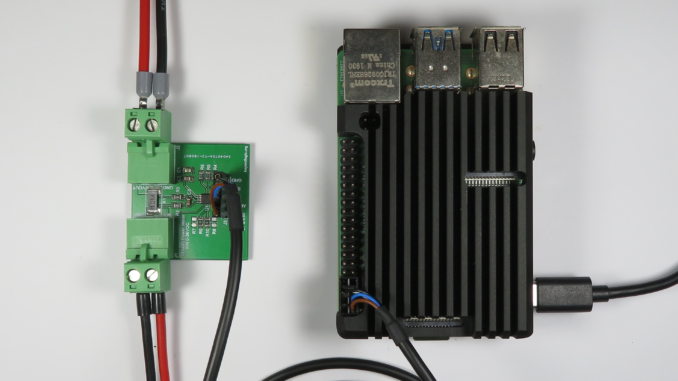
Measuring DC Voltage, Current, Power, Energy & Charge with a Raspberry Pi
Do you have a requirement to measure the voltage, current and power drawn from a battery or by a device using a Raspberry Pi? Perhaps you are also seeking to measure energy consumed (watt/hours) or charge (amp/hours) to determine state of charge (SoC) like a coulomb counter? If the answer …