CAN - Controller Area Network
Example C SocketCAN Code
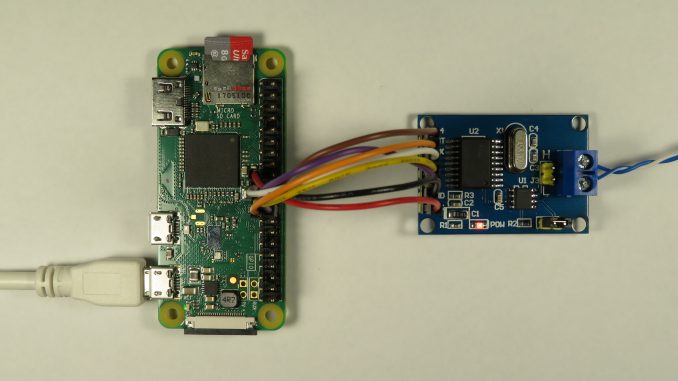
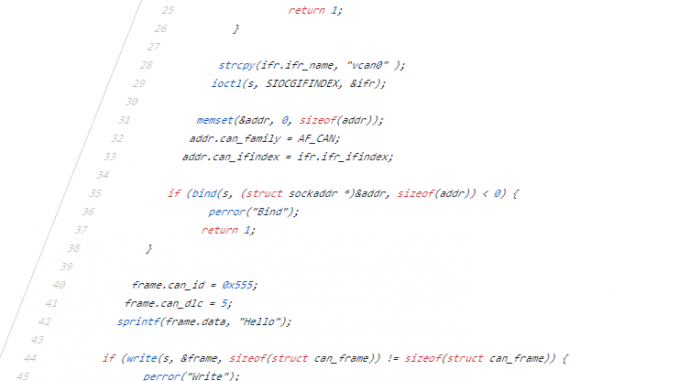
Writing user space C code to talk to CAN devices via the Linux SocketCAN interface is relatively simple and efficient. SocketCAN uses the Berkeley socket API and hence is very similar to communicating with other network socket devices. Below is a simple guide to get you started reading, writing and …